Latest update 2016-08-21
Updated links 2021-07-31
How to setup a NAZE32 and NazeMini
For Airplane and Flying Wings for Return to Launch functions.
Change the direction in the servo TAB.
Endpoints should be set in the Gui and not in the Transmitter.
fw_gps_maxcorr = 20 // Max Roll input from GPS (For Flying wings set to >=30)
fw_gps_maxclimb = 15 // Max Climb input
fw_gps_maxdive = 15 // Max Dive input
fw_gps_rudder = 15 // Max Rudder input if rudder is available
GPS modes Need to be activated together with Angle or Horizon modes.

Passthru = Manual flight Mode
Acro = Normal mode
Baseflight Gui now have a working servo mixing tab to use.
Before it was supported by Gui i created a simple
Windows App to setup Custom Airplane
Download ServoMixer_CLI.exe (right click save as!)
 Smix = Mixer ID
Smix = Mixer ID
Servo = OutputServo
Input = Selected source
Rate = % rate and reverse with minus.
Speed = Higher is faster.(3 gives a nice speed for Flaps )
Min/Max = Endpoints 0 - 100 // 50 = Centerpoint
AUX select = Activate the rule with a AUX switch. zero for always active.
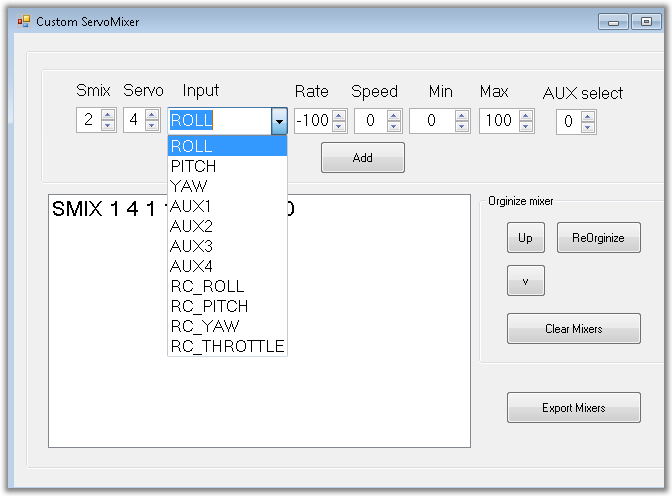
Create new rules
Select Output servo,Input,Rate, Min, Max and controllBox
Press Add to complete.
Add the mixers you need for your model.
 Mark a rule to edit it.
Mark a rule to edit it.
Press modify to save the modification.
Organize the list and move rules up or down.
Clear the list or fix the number order with
Reorganize button
Export mixers when done.
 Edit the mixers manually before exporting.
Edit the mixers manually before exporting.
You can Copy the text and paste it in Baseflight CLI intercace.
Or select correct Comport and Send it direct to the NAZE board.
Baudrate is set to 115200.
Make sure The Comport is closed and no other programs is
connected.

A CLI window will be shown to verify the communication.
Press Back to close the comport again.
Now you can connect Your Baseflight configurator to NAZE again.
Updated links 2021-07-31
How to setup a NAZE32 and NazeMini
For Airplane and Flying Wings for Return to Launch functions.
NOTE!
Magnetometer and Barometer is NOT needed for Airplanes.
A Naze32 Acro or AfroNaze together with a Gps module is sufficient.
Connection diagram for NazeMini

Owners manual from Abusemark
Connection diagram for Naze32

Owners manual from Abusemark
Most settings is available in the configurator.
The Settings for Elevator compensation is not active though it always show zero.
That is still a CLI command if you need to adjust it..
I recommend to install the latest dev for Fixed Wing.
It have all new fixes and functions.
Install it with the Firmware flasher in Baseflight Gui
New Updated Version
Here's video from Matthew Ogborne where he's testing FW_160622.
The more advanced F3 boards is not supported by Baseflight.
Magnetometer and Barometer is NOT needed for Airplanes.
A Naze32 Acro or AfroNaze together with a Gps module is sufficient.
Connection diagram for NazeMini
Owners manual from Abusemark
Connection diagram for Naze32
Owners manual from Abusemark
Most settings is available in the configurator.
The Settings for Elevator compensation is not active though it always show zero.
That is still a CLI command if you need to adjust it..
I recommend to install the latest dev for Fixed Wing.
It have all new fixes and functions.
Install it with the Firmware flasher in Baseflight Gui
New Updated Version
Link updated
Baseflight_FW_160622 (right click save as!)
Baseflight_FW_160622 (right click save as!)
Here's video from Matthew Ogborne where he's testing FW_160622.
If he had followed the recommended settings his first flights would have been much smoother.
Enter CLI mode in the Gui.
To setup Baseflight for a Airplane
Type preset Airplane and enter.
Or to setup a Flying Wing
Type preset Flying_Wing and enter
To setup a normal Airplane with RTH & PosHold
The latest version now have a simplified setup.Enter CLI mode in the Gui.
To setup Baseflight for a Airplane
Type preset Airplane and enter.
Or to setup a Flying Wing
Type preset Flying_Wing and enter
Therese commands will change the settings to suitable values to start with.
What remains is to select the GPS and receiver type you are using in the config TAB
Transmitter setup
Soft serial setup
What remains is to select the GPS and receiver type you are using in the config TAB
Transmitter setup
Use the Receiver Tab in the Configurator and ensure that your transmitter
Send the channels within 1000 - 2000 range and centers 1500.
Failsafe will be triggered if the value falls below 995µs.
The failsafe threshold can be changed in cli.
Send the channels within 1000 - 2000 range and centers 1500.
Failsafe will be triggered if the value falls below 995µs.
The failsafe threshold can be changed in cli.
Soft serial setup
Failsafe setup
The preferable way to detect a Lost connection is to program the radio to
Stop sending PPM/PWM signals.
Or to program it to center all channel and trim throttle channel below the threshold value.
Stop sending PPM/PWM signals.
Or to program it to center all channel and trim throttle channel below the threshold value.
Servos
If the Gyro compensate in wrong direction when you move the plane.Change the direction in the servo TAB.
Endpoints should be set in the Gui and not in the Transmitter.
The parameters for the Navigation.
Max allowed influence from GPS code in degrees.fw_gps_maxcorr = 20 // Max Roll input from GPS (For Flying wings set to >=30)
fw_gps_maxclimb = 15 // Max Climb input
fw_gps_maxdive = 15 // Max Dive input
fw_gps_rudder = 15 // Max Rudder input if rudder is available
fw_climb_throttle = 1900 // Limits Throttle during climbs
fw_cruise_throttle = 1500 // Suitable average throttle
fw_idle_throttle = 1300 // Lowest throttle during Descending
fw_roll_comp = 100 // How much Elevator compensates Roll in GPS modes
fw_rth_alt = 50 // Min Altitude to keep during RTH. (Max 200m)
small_angle = 180 // Will allow the Plane to be Armed in any position.
fw_cruise_throttle = 1500 // Suitable average throttle
fw_idle_throttle = 1300 // Lowest throttle during Descending
fw_roll_comp = 100 // How much Elevator compensates Roll in GPS modes
fw_rth_alt = 50 // Min Altitude to keep during RTH. (Max 200m)
small_angle = 180 // Will allow the Plane to be Armed in any position.
GPS modes Need to be activated together with Angle or Horizon modes.
Flight Modes
Passthru = Manual flight Mode
All stabilization is disabled.
Acro = Normal mode
Gyro Stabilization is active..
Horizon = Stable mode
Gyro And Accelerometer To return the plane to level.
PosHold + ANGLE = Hold position mode
Uses Gps to Circle the point where it was activated.
RTH + ANGLE = Return to home mode
Uses Gps to return home.
Starts circling after return
RTH + ANGLE = Auto Launch mode
Use RTH to launch the plane.
Activate before launching.
Will Climb to RTH altitude and
Starts circling around home.
Starts circling after return
RTH + ANGLE = Auto Launch mode
Use RTH to launch the plane.
Activate before launching.
Will Climb to RTH altitude and
Starts circling around home.
Failsafe RTH = Emergency Return mode
Uses Gps to return home.
Will attempt to land the plane when returned.
Advanced setup of Custom servo mixer
Setup a CUSTOMPLANE
All servos can be programmed with different functions.Baseflight Gui now have a working servo mixing tab to use.
Before it was supported by Gui i created a simple
Windows App to setup Custom Airplane
Download ServoMixer_CLI.exe (right click save as!)
Servo = OutputServo
Input = Selected source
Rate = % rate and reverse with minus.
Speed = Higher is faster.(3 gives a nice speed for Flaps )
Min/Max = Endpoints 0 - 100 // 50 = Centerpoint
AUX select = Activate the rule with a AUX switch. zero for always active.
Create new rules
Select Output servo,Input,Rate, Min, Max and controllBox
Press Add to complete.
Add the mixers you need for your model.
Press modify to save the modification.
Organize the list and move rules up or down.
Clear the list or fix the number order with
Reorganize button
Export mixers when done.
You can Copy the text and paste it in Baseflight CLI intercace.
Or select correct Comport and Send it direct to the NAZE board.
Baudrate is set to 115200.
Make sure The Comport is closed and no other programs is
connected.
A CLI window will be shown to verify the communication.
Press Back to close the comport again.
Now you can connect Your Baseflight configurator to NAZE again.
157 kommentarer:
thank you for your "how to",
i'd like to ask something your help would be appreciated...
would a 6dof naze (acro, of 6dof flip32) do the job with a ublox neo6 gps to have the rth function?
sorry for the english speaking (french pilot)
hope you will help.
thanks anyway for what you've already done
A Acro Naze (6DOF) together with a GPS is good enough for Fixed wings.
The data from GPS is used so Mag and Baro isn't needed.
In fact i have reached better results with Gps data than from the sensors.
Good luck
Patrik
thank you very much for your answer, i FInally had the answer, by reading the fpvlab thread.
If I want a failsafe with rth, I have to make a setting on my receiver with enough throttle right? with horizon or angle mode activated and rth..
thank you for making this possible, this low cost autopilot is just a miracle!!
or Failsafe RTH make sure Your Receiver either stop sending pwm/ppm signal.
Or send throttle below Failsafe threshold value (980µs)
If you can't trim tx low enough change the Failsafe threshold value so it can get triggered.
You don't need to set any modes on switches.
The code handle everything when it detect failsafe.
You're right this can be a really cheap insurance..
Afro Naze ~25$
GPS ~15$
It's hard to beat!..
Hi Dave,
Custom mixer is the way to go.
First setup a mixer for the plane.
mixer CUSTOMPLANE
smix reset
smix load flying_wing.
Will load the built in mixer.
SMIX 1 4 1 50 0 0 100 0
SMIX 2 4 2 50 0 0 100 0
SMIX 3 5 1 50 0 0 100 0
SMIX 4 5 2 50 0 0 100 0
Then add 2 new to passthru AUX3 & 4 to S3 & S4
SMIX 5 6 7 100 0 0 100 0
SMIX 6 7 8 100 0 0 100 0
It's a bug i will fix.
You can lower Minthrottle to 1000 to stop the motor meanwhile.
Hi Patrick, i try to activate RTH before hand launch, but it seem my aileron will turn to max roll position, is it normal ? i'm using Ublox Neo 6Mv2 and looks like there's no issue on 3D fix and i can see 6+ sat lock, thx
@Mohd
No that's not normal.
Maybe you move the plane when Gyros calibrate when connecting the battery.
Try to place the plane stationary and start calibration with the sticks.
Elevator and Throttle Low and Yaw full left.
The servos should freeze for a second at max throws.
tq patrick, i've try calibrating with sticks and looks like everything is fine. I launch the plane in passthru mode and climb to some altitude. I try to activate posHOLD or RTH but suddenly my plane will dive to the ground. Also i've tried to assign one switch to activate only HORIZON mode (without RTH/POSHOLD) but my plane also dive to the ground . Can't figure it out why the plane cant go stable in horizon/angle mode, please help me.
***i deactivate passthru mode when activating HORIZON or RTH switch
ok Patrick never mind, already figure out my problem was due to reverse aileron in stable mode. My aileron go down instead of up when i lift up wing. Successfully maiden and RTH/POSHOLD done very well. Thanks a lot Patrick for your code.
Hi Patrick, me again, i would like to ask u regarding failsafe RTH which i'd setup my acro naze32 'failsafe detect threhold' to 995, i've setting failsafe on rx which will sendind throttle signal around 992. How do i know that my failsafe RTH is functioning ?
I've try to off my tx, then aileron will go into max full roll and max elevator up for about 1 or 2 second then it will back to stable and if i lift up wing i can see aileron up (probably now in failsafe RTH mode). Is it functioning?
You can see in the Gui when Failsafe is active.
The Angle/Level will be activated.
The elevator should be set to climb.
Throttle will rise to almost Full to gain speed and altitude.
If failsafe is activated within 10 meters from home position the motor will be disarmed and climb will be aborted.
The stabilization will still be active and the Ailerons should compensate for navigating around home and descend if airborne.
It's also a safety that motor don't start att full throttle if you should switch of the Transmitter near home with the model in your hand.
Hi Patrik.
I have a little Question about the Naze32 acro. There wasn´t a baro and a Mag on board so can i use these external sensor board? http://www.xxl-modellbau.de/BARO-BMP180-MAG-HMC5983-I2C-Board-Arduino-Multiwii-Multicopter
And where must i connect it? Am i right that i must soldering it to the SDA SCL pads? And where can i get the 3,3V.
Damn so many questions for such a little board :D
Thank you for this nice thread here.
Hi Dennis,
You don't need Mag or Baro on a airplane.
Data from the GPS is used for navigation.
Spend the money on a extra battery instead.
There's a 3v pad on the NAZE board.
Depending on Version it's next to the Led's or the usb connector.
Good luck
Patrik
Hi Patrick, thanks for ur explanation for checking failsafe, i've try the rth failsafe and looks like everything is fine and i'm so happy with this function, thanks Patrick.
Another question, i would like to ask u regarding 'sbus' . I got new cheap radio transmitter "Radiolink' AT9 from china. This radio support telemetry using R9D receiver. My problem right now is, R9D rx only have PWM and SBUS signal and there's no PPM in this rx (R9D). For ur info i'm using acro naze32. So if i use sbus to naze32, is it i can still use GPS an telemtry .
I run PPM on everything and have not tested Sbus.
But if you can set it up on softserial it should work.
Here's a basic instruction on Sbus setup.
http://www.netraam.eu/nazewiki/pmwiki.php?n=Howto.HookupASpektrumSatellite
It seems in basic config GPS and Sbus share Uart.
Hi Patrick, i got problem when trigger RTH or PosHold, there is no action at all, the plane go straight without turning to launch location. before this everything seem ok when using PPM mode but after i change to PWM looks like RTH and PosHOLD not functioning. Already change back to PPM mode but still RTH and PosHOLD not functioning. I've check switch for RTH and PosHOLD is in correct position (angle/horizon + GPSHOME) and sure i've to wait GPS to lock signal before launching the plane. Any idea ?
I have had some other reports of same bahaivour.
Test to use this older version.
http://panoramaic.se/Files/baseflight_NAZE_ezikiel.rar
I have changed version in the Blog post to.
Heyho today i tryed the old Version which you have post. If i activate the rth the plane moves straight in one Position away.
Doesnt work :/ but horizon and angle worked very well:D
Any idea??
Hi Patrick, already test old version and RTH function success, thanks a lot.
***Dennis, the old version post by Patrick is to resolve the earlier version which RTH was functioning at first but suddenly had an issue of not returning to launch location. If you have the same behavior then the old version should resolved the issue. If not then u have to check your configuraton.
Hmm i follow the Guide step for step. After flashing ezekiel i have the Problem when i change something and save the naze doesnt reboot. So i have to Save and disconect it by myself.
Did i have to Set all things for Navigation in the cli?? Rth alltitude etc?
Hi,
I added a Note in the instructions.
The Airplane Tab is not supported In the Ezikiel version ALL FW_Nav settings must be made in CLI.
Does this firmware work with F3-boards like TornadoFC, Dodo, SPRacing F3 etc? Or maybe F4 like OP Revo or TauLabs Sparky 2.0?
Thanks Patrick for mentioning fw_nav to be set in cli but for my setup i just leave it default the value and everything looks fine.
Dennis, if you follow the guide i think rth should work properly, there must be something u miss out. All setting i made in cli
My setting as below:
mixer AIRPLANE
feature PPM
feature GPS
feature FAILSAFE
feature FW_FAILSAFE_RTH
feature MOTOR_STOP
set maxthrottle =2000
mode selection switch i assign
RTH = angle + GPS Home
PosHOLD = angle + GPS HOLD
If u assign PASSTHRU mode then make sure don't activate PASSTHRU when u activate RTH or PosHOLD
Also u have to make sure GPS signal is lock before u can launch your airplane and i dont assign any switch for ARM (use stick RUDDER to ARM or DISARM)
I have the same settings.
But i dont activate Mixer Airplane in the CLI.
passtrough was on a switch in position 0 Angle in 1 and angle and RTH on position 3
PosHOLD i didnt have.
Arm Disarmed was on another switch
I launched my Airplane with 12 sats
I will test to activate the airplane Mixer with the CLI.
My Naze wont to reboot when i save anything.
after reboot the gui doesnt give any response and i must use the disconect and connect button.
THX for your help :)
Will the rth feature work for planes without ailerons? Like easystar, which is rudder+elevator only. Thanks
Hello Patrik and everyone, after reading this blog of yours that a friend pointed me out (thanks Rui), I loaded baseflight (GUI 0.68.3) to a flip32+ (10DoF with baro and compass) controller from bangood.
I moutedit on my airplane FT Slinger (from flitetest design), motor, 2 ailerons, ruder and elevator, using customplane mixer.
I have also connected a GPS (Neo-6M) configured for Uboxat 58600 baud.
On the bench everything worked fine, I have configure passthrugh, acro and horizon (no GPs relate to start first test flight), and surfaces moved as expected.
I have lauched the airplane and motor imediatly stopafter take off (landed a bit hard), seconf flight after getting back to the bench and not being able to simulate the failure, took-off flyed as expected in acro, hroizon and passthrought, yet another motor stop forced another emergency landing.
Third attemp,same thing another motor stop.
Feels like a software reboot.
Last one the reboot was not complete, as wil plane one hand after landing , all surfaces started to move one at a time, like glitch but only one surface at a time in a circle, and no response to radio input.
Motor not moving.
switched to desarm (switch assigned) and back to arm and motor started work normaly as well as all surfaces.
A imediaty testes with direct connection of servos and ESc to RX, and flown without failure.
My assumption is that the problem lays on the controller/software.
have you heard of similar problem ?
If so,is there a known fix ?
I have not heard about that problem on a NAZE.
But on the MWii 8bit Mega boards.
It can occur if the BEC can't supply enough power to run the controller.
Or if the ESC gets too hot and cuts.
When the controller reboots and is ARMed it can lockup in the boot sequence.
If you disarm the controller will continue the boot sequence.
But the servos will be wrong calibrated and the plane can only be flown safely in Pasthru.
Could you please answer the question about flying the plane without ailerons?
If the RTH does not work in rudder+elev configuration I'll install the aileron servos just for it, although I prefer the default configuration for FPV/Video purposes
@Tim
I have not tested it myself.
But i know others who have connected the Rudder to one of the Aileron outputs.
@Dennis Ehlers
If the Controller is ARMED you will have similar issue.
Settings isn't saved and controller freezes in the Bootup.
It's the only thing i can come up with besides HW faults.
@Patrike,
Thank you for your clue.
Yet I believe I found the reason for reboot of the board.
I Flewit without controller (Flip32) i.e., connecting surfces and Esc directyto receive and there was no failure.
I replaced the ESC by a Blue Series from HK,and there was no failure again.
My bilieve is now that the frequency of the motor PWM is too high form the previous ESC (HK 30A), and it looses sync causing shorts on motor output, this leads to spicks on puwer line that feed the board.
I will test again the previous ESC, this time with lower PWM frequency and let you know (I believe there is a way to set this in baseflight).
I'm sharing this beacuse I believe most of us that already fly quad already know this problem, but those that are just adding this to old plane (like me) using old hardware my face the same problem.
Would be great if max value of fw_rth_alt would be higher like 1000m. So this AP would be suitable for long range missions.
Hi Patrik,
Love the custom firmware.
Could you possibly share the source for this?
Thanks,
Øystein
Hi Øystein,
Glad you like it.
You can find the latest code in my Git.
https://github.com/EmilsPa/baseflight/tree/FW_Updates
Thank you very much! :)
Can this connect to bluetooth module to be able to connect to android app like ez gui or multiwii congigurator for easy PID tuning?
Thanks
Yes it works with Bluetooth.
Even with long range telemetry links.
Hi Patrik,
first thanks a lot for this useful guide...
I'm trying to use a naze32 on my bixler 2 and I have a simple question. I'm using a PWM receiver on the plane, and the original idea is to GPS. how can I connect the GPS? I mean, I know that I should connect it to the channel 3 and 4 but how are the channel remap? do I need to manually remap them? is it also possible to use the mimim OSD with it?
thanks in advance for you help..
Regards
"When GPS feature is enabled, channels 3 and 4 are are used for 3.3V GPS connection.(3:TX, 4:RX). with CPPM receiver, these are normally unused, with standard receiver, connect AIL to 1, ELE to 2, THR to 5, RUD to 6, and AUX1/2 to channels 7 and 8."
You can use the minimosd but you have to connect it at the bottom. There are two holes named tx and rx where you have to solder some pins. 5v and gnd get from the pins s2 because they are free.
But if you want to connect the usb you have to disconnect the tx and rx from the minimosd off the naze.
I hope this will help you and you understand what I mean :D
https://www.dropbox.com/s/aqntgeqmi3dlmfa/Foto%2009.01.16%2C%2021%2041%2035.jpg?dl=0
Here was a little photo.
Mit freundlichen Grüßen
Dennis
Hi Dave,
There is no real setting for diameter around home.
Only a limit in Max banking.
fw_gps_maxcorr = 45 Is the tightest circle you can get without Rudders.
fw_roll_comp Adds Elevator based on banking angle and can also help to tighten the circle if you increase it.
Default value is 1:1.
As observed... In Baseflight, gps_wp_radius have no effect at all on Planes!..
Thanks Patrik.
Currently im setting up my flip32 and gps, what should be the baud rate for gps, im using Mini gps Ublox7 from aliexpress.
Currently factory setting for gps is 9600 and the flip32 com baud rate is 115200.
Thanks.
"NAZE32 and Patrik Baseflight FixedWing"
Hey Patrik, is this the correct setting mixing for my Bixler 2 with GPS connectet to
pin 3,4?
mixer CUSTOMPLANE
smix reset
SMIX 1 1 1 100 0 0 100 0 /AIL1
SMIX 2 5 1 100 0 0 100 0 /AIL2
SMIX 3 2 2 100 0 0 100 0 /ELEV
SMIX 4 3 5 100 0 0 100 0 /THR
SMIX 5 4 6 100 0 0 100 0 /RUD
SMIX 6 7 7 100 0 0 100 1 /AUX1 switch CH5 HIGH-HORIZONT,GPS HOLD-LOW Passthru
SMIX 7 8 8 100 0 0 100 2 /AUX2 switch CH6 HIGH-HORIZONT,GPS HOME-
Thank you for answers.
Hi I have installed this build, but am having problems. Randomly the plane stops responding to the controls and it crashes.
Im using a flip32 mini board.
I thought it might be the 5v bec browning out under load, so i changed it to a 2a version and it still happened again today.
Yesterday the ESC went full throttle on the crash and the only way to stop it was to remove the battery. Today it didnt go to full throttle but the flip32 was locked up. both of the red and white leds on the board were lit. The Frsky RX leds was responding as expected, but the flipe32 was locked.
Any idea why?
I have my GPS cable running next to the motor wires, could that cause issues?
Hi Paul,
I don't think GPS cable running next to the motor wires is a problem.
One thing that can be a issue with FRsky is the 22/27µs frames!.
If you have old FW in the frsky and use more than 2 AUX channels the PPM can loose sync.
One other thing can be If any of ch 1-4 is below Falsafe threashld.
Then the FC can activate Failsafe!
Not sure what else can be the issue!.
Hi Patrik,
Thanks for you reply.
I did some more investigation on the bench and found that the problem is easily replicated but I still don't know the reason.
When the GPS is connected, the flip32 WILL freeze, always less than 10 mins. Even when it is sitting on the bench, no extra power being used (by servos ect..).
If I repeat the test but with with GPS unplugged it works normally and doesn't freeze at all!
When I get a freeze, the LED's on the Flip32 will go red (i think) and is stuck on, There is no control through the radio link and no USB communications. The only way to get it to unfreeze I need to cycle power.
I hope you can help, as I really would like GPS working on this plane.
Thanks
Paul
Hello PatrikE
I was a big fan of your Multiwii version now I'm going to try this in a 1.65m wing, hopefully this weekend :)
I have two questions:
a) why did you use baseflight and not cleanflight which has a few more interesting features?
b) Do you know if I can add a bluetooth to a softserial? I can do that easily on cleanflight, that's actually my reason behind the first question.
Thanks a lot!
I have not seen any freezes on my Naze boards both Acro and Afromini.
I can leave them running on the bench connected with USB and no servos.
Often several days in row with Gps connected without problem.
I mostly use remote desktop and like to have the FC connected to the Dev Pc.
The LED usually go on if Failsafe.
a)
Baseflight is similar to MWii in code and was easy to use.
Cleanflight also had a reputation of behaving strange on Fixed wing.
That's why!
b)
I have not played at all with the softserial.
But it should work i think.
Baudrate is limited though!.
But i guess you know that better than I do. ;)
Thanks for the answers.
I know how to activate the softserials, as a matter of fact, I already have one forwarding FrSky telemetry. My problem is, I cannot make one send the baseflight protocol so I can use ez-gui to configure it like I do in cleanflight. If I connect to a "real" serial port works fine but the ones I have are already been used by gps and OSD.
Hmmm... may I should try the OSD trick that APM uses, not wire the TX to the OSD. Don't know if works but...
Just to answer my own question, no, connecting just the TX like in APM does not work so, unless I figure out how to use bluetooth via softserial, it is a no go unfortunately.
Set soft serial to output msp at a lower baud (whatever your Bluetooth is set to, I use 57600), drop your main baud also, and should work
Set soft serial to output msp at a lower baud (whatever your Bluetooth is set to, I use 57600), drop your main baud also, and should work
Yes, I know that, I've done this in cleanflight but I can't find the right sequence of commands to do that in baseflight.
Patrik,
I am using Cleanflight in a Flip32+ FC. I have a Taranis TX & RX. It is a nitro powered airplane. mmix and smix are NULL sets. CF mapped the servos to outpins 3 thru 6. I would like to move them to 1 thru 4 since I do not have a gimbal or electric motor on pins 1 & 2.
Is this possible. It appears that CHANNEL_FORWARD or servo_tilt is causing the servos to be mapped in a +2 order. I have used 'dump master' and I don't see anything strange.
I had a terrible time locating which output pin went with each servo!
Thanks
Garry
This is amazeballs!
Just tried your firmware with my scratchbuilt ugglan from boopidoo =)
It flies beautifully with your settings that came with the .rar file, and that with a sub $100 fc and gps. Now I'm going to add canards to it and learn how the free servomixer works.
Ha de bäst!
Hi,
Thank you for you firmware.
I've installed it on my naze3 rev5 set up everything as per instructions. After launching the plane I tried position hold and it worked beautifully. Then I flew little further to test RTL, again it worked perfectly and the plane returned home and started circling around my head. I was amazed how well it worked and kept watching through my goggles for a minute or so when suddenly my OSD said DISARMED and the plain started heading vertically into the ground.... tried disarm and re-arm it with the switch but nothing helped and I totally lost control over the plane. In the result the plane is totaled and the battery went on fire under the impact.
Is there anything obvious I missed or did wrong?
Thanks,
Adam
Hi Adam,
I'm sorry for your model.
It sounds like the code behaved as it should until OSD said DISARMED.
There's only one scenario when the code disarms in air.
If You loose RC control the FC will disarm over home to initiate a descent.
In your case it sounds like you had a power drop that caused the FC to Reboot in Air.
And the plane can´t recover after FC is rebooted since the Gyros calibrate during movement.
It's not easy to know after the battery burned it it was faulty before.
Servos can also fail and short the BEC.
I have had some Brownouts on models too.
It normally results in a spiral and crash.
Large capacitor and separate Bec for the FC is best.
But if Battery dies there's no return....
I hope you keep up and give it a new chance.
/P
Hi Patrick,
The battery was almost fully charged and died from the impact. Up until the impact my telemetry didn't give me any warnings or alarms. I suspect it could have been a voltage drop caused by current drown by servos. I did have voltage drops before that were causing my gps/osd to go off and on but I rectified it by powering the gps and osd module from a separate bec. I didn't have the FC to reboot itself before though.
Well I might give it a go again at some point on another plane as your code worked really well.
Thanks,
Adam
I need help friends, Patrick firmware works perfectly on my FX -61 wing. no GPS and no OSD .
I need to install the OSD , but I have a mini and precise naze32 enable MSP .
In Cleanfight firmware and iNAV can make the OSD function , but these firmware has a problem that when accelerate the servos wing move alone.
Does anyone have any solution?
Sorry my poor english (google translator)
I just wanted to say thank you so much. I have spent literally days trying to get clean flight and then baseflight to work with my fixed wing. What selfish people that they do not tell you their software does not work standard with fixed wings, even while they claim it is a "stable" version and offers fixed wing in the menu. Thank you again for your wonderful work. Chris Hachmann
Patrik, do I want to use "in flight calibration"? I am putting this on a Parkzone Radian Glider and I was wondering if the PID settings were too low as the plane tends to be unstable at times in the wind. Thank you.
The PID's i recommend here is suitable for most Sport planes.
Slow flying planes may need higher P values to compensate harder.
You will notice when you go to high because the plane will overcompensate and Wobble slightly.
Thank you Patrik. Yes, I increased the P values to the movements I used to see when I flew it with a Lemon 3axis stabilizer. I guess the I and D values can be left alone?
Hi Patrik, The hex file is working great, but I am having a terrible time getting the RTH to work. Baseflight mode selector was set Horizon, Mag, RTH. But the plane turned away and tried to go away. Tomorrow I will try it with just Angle+"GPS Home". But I notice that the "GPS Home" does not turn green in Mode Selector as does Horizon when the box is selected. Is this part of the problem? Why do the GPS features not turn green in mode selector when selected? I am showing the GPS is locking on many satellites in Baseflight. Thank you. Chris
I set it up as Angle+RTH and the plane is still flying away. What am I doing wrong?
If the HOME don't turn green in mode selector it's something wrong.
Minimum 5 sat is needed for FIX but for a reliable function you need >6-7.
Home Position must be set.
One more thing to remember is if you select Angle + GPS Home.
Passthru will override GPS modes.
Never use BARO OR MAG modes on planes.
I have a newer testversion you can use now.
There Passthru no longer override GPS Home.
panoramaic.se/Files/Baseflight_FW_160622.rar
I noticed something very odd that maybe explains what I am doing wrong. In setup the Arrow for the plane (quad) is forward (if I lift the front of the plane then in baseflight I see the front of the Quad in Baseflight goes up), but somehow the direction North and South are reversed. I re-calibrated the magnetometer and it made no difference. I tried a different Naze32 and I see the same issue. The board is mounted with the mini-usb toward the back of the plane.
Are there any other changes in your new hex file?
Thank you.
Chris
I think I give up. I prop came loose at one point during a flight today and the plane landed behind a hill. I must have lost signal b/c RTH was initiated and when I got to the plane the motor was spinning at failsafe throttle, elevator was up, and rudder was turned. Shouldn't RTH disable automatically when the plane is on the ground? It seems the plane did not know it was on the ground and was trying to get to it's RTH altitude. If the prop had not come loose then I would have fried the ESC and/or motor. Do you think I would have better luck with PixHawk?
Chris
The flight controller don't have any land detect!
And it don't know that the prop have came off.
It only turn off engine when it returned home in Failsafe RTH.
But you are right there should be a detection if the plane is static for more than xx sec during Failsafe to prevent burned electronics.
About Pixhawk..
I have never looked at it and can't answer on that.
The new Hex file only have some minor changes but the Passthru priority is main diff.
Maybe RTH should not enable under a certain altitude, say 4 meters off the ground. At low altitudes you might be behind trees, or you might be getting too close to people to enable throttle (especially given the inaccuracies of GPS, you might be only a meter or two meters off the ground with error of measurement). So a parameter of RTH at under 4 meters is maybe just motor shutoff and the 1 degree glide angle. Can you put that in the code, or tell me how to do it and I will put in the CLI for my own flying. Thanks. Chris
I guess you could add a condition with min altitude here.
https://github.com/EmilsPa/baseflight/blob/Dev/src/fw_nav.c#L143
But remember if you fly from a hill you nay fly below Home pos and then Failsafe RTH always disarm in that case.
tested with delta wing but encountered with issue, upon throttling left wing also was jerking
Sounds like High PID's or vibration from Motor/Prop!
Good starting values for that type of planes is.
Gyro P=1.5 Roll & Pitch
TPA = 0.90
I'm a bit unclear as to how to ask questions. I hope this works.
When entering "fw_gps_maxcorr = 20" in the cli I get ERR: Unknown command
What might I be doing wrong? Please can you let me know.
Also, when downloading and installing the 10 April rar file after unzipping it, it's actually still the 3 April one in hex.
Thanks!
I disabled the RTH feature and the failsafe feature completely in baseflight. I thought this would prevent any future problems. But today at the field, for some unknown reason from about 100 ft my plane's control surfaces all went into full deflection resulting in a spiral into the ground. This happened on the 4th flight of the evening, it had been flying fine. This does not make any sense, though I know the Naze32 likes to lock the surfaces momentarily after it is disarmed. Perhaps I gave too much rudder in the flight and the board disabled? Very odd.
You should not use Arm with sticks.
It's safer to use a AUX switch.
But it sounds like you encountered a brownout!.
The BEC can't provide enough power to drive Naze + GPS + OSD + servos.
This results in a Reboot In Air!
It happened twice for me before i realized why it crashed.
The best solution is to use a separate BEC for Servos and FC so the other electronics dosen't brown out when servos Work hard.
You can also use a large capacitor >3300µf to the FC.
Hi Patrik,
I tried to use your latest 160622 firmware and succesfully flash it to the board.
The problem is when i click connect on the configurator, it give warning as the firmware was not supported, looks like api version problem, i use the latest betaflight configurator
Could you please advise how to solve this problem ?
Thanks
Try Baseflight configurator instead ;)
Hi Patrik,
Working now, I really forget about baseflight already 😄
Thanks
Hi Patrick!
Thanks for your great work. We really need this working cheap FC for fixedwings.
I tried your fw on my Skywalker X5 with Flip32 board.
After a few parameter tweaking for me it worked amazing and stable. Really like the RTH.
May I ask your boosted source code available somewhere?
I would like to add more telemetry features in it.
(Sat num, HOD, Speed, Vspd, GpsAlt, BaroAlt, etc.)
Thanks and regards, Victor
The source code is in my GIT.
https://github.com/EmilsPa/baseflight/tree/Dev
Thank you for the fast answer. :)
Hi Patrik,
what was the reason for this mixer change on May 29 2016
src/mixer.c
static const servoMixer_t servoMixerFlyingWing[] = {
- { 3, INPUT_ROLL, 100, 0, 0, 100, 0 },
- { 3, INPUT_PITCH, 100, 0, 0, 100, 0 },
- { 4, INPUT_ROLL, 100, 0, 0, 100, 0 },
- { 4, INPUT_PITCH, 100, 0, 0, 100, 0 },
+ { 3, INPUT_ROLL, 50, 0, 0, 100, 0 },
+ { 3, INPUT_PITCH, 50, 0, 0, 100, 0 },
+ { 4, INPUT_ROLL, 50, 0, 0, 100, 0 },
+ { 4, INPUT_PITCH, 50, 0, 0, 100, 0 },
};
Is it because of this servo throws reduced in half compared to Jan 6 2016 firmware?
Thanks!
No servo response from the naze32 board. Using baseflight on a rev 5 board. Follow every step and it does not work. Any suggestions?
The change of servoMixerFlyingWing[] was done to keep the symmetry between Ail & Elev.
It also results in a reduced Max throw as you guessed.
@JD FPV
I would guess you have uploaded the Stable 2015.08.27.....
That version has a Bug that break the servo function.
Use my Dev version instead.
http://panoramaic.se/Files/Baseflight_FW_160622.rar
Run the preset Flying_Wing CLI command.
Or preset Airplane.
Hi Patrick,
Would like to use your software on a twin motor plane with differential thrust. I found you made a custom version "baseflight_NAZE_Twin_RTH.zip" in 2014. http://fpvlab.com/forums/showthread.php?27854-NAZE32-for-fixed-wing&p=597191&viewfull=1#post597191
Should I run this 2014 version or can I setup differential thrust in the most recent version of your software?
Thanks!
You can use the latest version.
You can activate vector trust in cli by setting the parameter to 1.
If it compensate in wrong direction swap the motor outputs.
Good luck
I have installed your firmware into a Naze 32 6dof and am having trouble setting up GPS modes. I have both a GPS and a Bluetooth adapter wired up and they both appear to be working with your firmware. When I setup my GPS RTH and GPS Hold, I am also setting up Horizon on the same position as you recommend. The problem is when I flip the switch only Horizon mode turns green and nothing I do will make the GPS Hold or RTH light up green. Have I missed a setup step?
I attempted this unsuccessfully in Cleanflight before I found your firmware and while both modes wanted to make my Blunt Nose Versa Wing into a lawn dart... I was at least able to activate them and they both turned green.
Hi Patrik,
Thank you for the software.
I have a problem that you might be able to help.
I connected naze32 acro + neo 6m v2 (baud rate : 9600).
In the u-blox center the GPS module work and able to get 3D fix. I tried to connect it to naze32 but it does seems to communicate. An ubec is also connected to motor pin to provide 5v to the GPS. Just wondering how to get it work?
Thank you.
This is my settings
Current settings:
looptime = 3500
emf_avoidance = 0
midrc = 1500
minthrottle = 1150
maxthrottle = 2000
mincommand = 1000
mincheck = 1100
maxcheck = 1900
deadband3d_low = 1406
deadband3d_high = 1514
neutral3d = 1460
deadband3d_throttle = 50
motor_pwm_rate = 400
servo_pwm_rate = 50
pwm_filter = 0
retarded_arm = 0
disarm_kill_switch = 0
fw_althold_dir = 1
reboot_character = 82
serial_baudrate = 115200
softserial_baudrate = 9600
softserial_1_inverted = 0
softserial_2_inverted = 0
gps_type = 1
gps_baudrate = 1
gps_ubx_sbas = 0
gps_autobaud = 0
serialrx_type = 0
spektrum_sat_bind = 0
spektrum_sat_on_flexport = 0
telemetry_provider = 0
telemetry_port = 0
telemetry_switch = 0
vbatscale = 110
currentscale = 400
currentoffset = 0
multiwiicurrentoutput = 0
vbatmaxcellvoltage = 43
vbatmincellvoltage = 33
vbatwarningcellvoltage = 35
power_adc_channel = 0
align_gyro = 0
align_acc = 0
align_mag = 0
align_board_roll = 0
align_board_pitch = 0
align_board_yaw = 0
yaw_control_direction = 1
acc_hardware = 0
mag_hardware = 0
max_angle_inclination = 500
moron_threshold = 32
gyro_lpf = 42
gyro_cmpf_factor = 600
gyro_cmpfm_factor = 250
pid_controller = 0
deadband = 0
yawdeadband = 0
alt_hold_throttle_neutral = 40
alt_hold_fast_change = 1
throttle_correction_value = 0
throttle_correction_angle = 800
rc_rate = 100
rc_expo = 0
thr_mid = 50
thr_expo = 0
roll_rate = 0
pitch_rate = 0
yaw_rate = 0
tpa_rate = 90
tpa_breakpoint = 1500
failsafe_delay = 10
failsafe_off_delay = 200
failsafe_throttle = 1200
failsafe_detect_threshold = 985
auto_disarm_board = 5
rssi_aux_channel = 0
rssi_aux_max = 1000
rssi_adc_channel = 0
rssi_adc_max = 4095
rssi_adc_offset = 0
rc_channel_count = 8
yaw_direction = 1
tri_unarmed_servo = 1
gimbal_flags = 1
acc_lpf_factor = 4
accxy_deadband = 40
accz_deadband = 40
acc_unarmedcal = 1
small_angle = 180
acc_trim_pitch = 0
acc_trim_roll = 0
baro_tab_size = 21
baro_noise_lpf = 0.600
baro_cf_vel = 0.985
baro_cf_alt = 0.965
accz_lpf_cutoff = 5.000
mag_declination = 0
gps_pos_p = 11
gps_pos_i = 0
gps_pos_d = 0
gps_posr_p = 20
gps_posr_i = 8
gps_posr_d = 45
gps_nav_p = 30
gps_nav_i = 20
gps_nav_d = 45
gps_wp_radius = 200
nav_controls_heading = 1
nav_speed_min = 100
nav_speed_max = 300
nav_slew_rate = 30
p_pitch = 20
i_pitch = 30
d_pitch = 23
p_roll = 20
i_roll = 30
d_roll = 23
p_yaw = 85
i_yaw = 0
d_yaw = 0
p_alt = 30
i_alt = 20
d_alt = 45
p_level = 90
i_level = 10
d_level = 100
p_vel = 120
i_vel = 45
d_vel = 1
fw_vector_thrust = 0
fw_gps_maxcorr = 25
fw_gps_rudder = 15
fw_gps_maxclimb = 20
fw_gps_maxdive = 15
fw_glide_angle = 0
fw_climb_throttle = 1900
fw_cruise_throttle = 1500
fw_idle_throttle = 1300
fw_scaler_throttle = 8
fw_roll_comp = 100
fw_rth_alt = 100
fw_cruise_distance = 500
fw_minspeed = 500
fw_Passsthru_Prio = 0
#
Hi Patrik,
I'm new to fixed wings, and have just bought a SkyCruise 2400 which I will like to equip with a Naze32 with your firmware. I have read through your instructions and the comments field, but I can't see anything about flaps. will it control flaps as well or is that up to me to control them? and what CLI command do I need to use?
Best regards
Villy
Cki commands to start with
mixer CUSTOMPLANE
smix reset
smix load AIRPLANE
Then you can add flap function on the Ailerons in Servo Tab
@Chris Rogers
Gps modes is only available if you setup the GPS correct and have FIX.
@Hartono Sutanto
Check that your TX/RX wires is correct connected.
Tacker så mycket. I'll do that.
Interesting that a less than 25$ flight controller with the right software is as good as a 220$ dedicated fixed wing flight controller.
@Patrik,
Thank you for the reply. ya the cable is correct and I even swap it around just to make sure. but same result. Maybe tonite I will try with a M8N GPS.
Thank you and will post the progress in the comment.
Hi Patrick, I just received my naze32 and flashed Baseflight_FW_160622 onto it. Everything works fine until I use preset Airplane. Then the led turns to red after a while and the receiver signals are not doing anything anymore. While if I reflash it with full chip erase, then everything works normal again.
Hey Patrick,
Thanks for the reply. Could you help me with the CLI command for differtail trust?
I found these differential thrust setting for Cleanflight:
mmix 0 1.0 0.0 0.0 0.3 # Left Engine
mmix 1 1.0 0.0 0.0 -0.3 # Right Engine
Can I just replace "mmix" with "cmix" to make this work with your software?
Thanks!
set fw_vector_thrust = 1
Is enough to activate it.
If motors compensate in wrong direction swap the wires.
Goog luck
When I take off in Horizon mode the flying wing rotates and starts flying upside down. Any ideas?
finally with M8N i manage to get a 3D fix. the GPS unit must be placed quite far away from the fc or otherwise difficult to catch satellite. The M8N is updated with the 3DR configuration file to get a better result. Time for testing.
Hi Patrik!
Thank you for developing this software, it looks very interesting! :-)
I'm a multirotor guy with so far no experience with flight controllers on fixed wing (however, I can fly fixed wing, and a have knowledge about multirotors, betaflight etc) . I'm planning to build an inexpensive FPV plane with RTH capabilities. I hope i not bother you to much with this burst of questions!
1. Do you have any links to recommend to start reading for a beginner like me? I have read all comments on this page, and are skimming through the "Naze32 for fixed wing"-thread on fpvlab.com. Are there any else reading material to recommend?
2. What naze32 do you recommend for this application? I guess the cheapest I can get now is a rev6 from banhgood, but I know that there have been tuning problems with the MPU6500 chip on multirotors. Does this problem apply here to?
3. Do you know if using FrSky X4R-SB in CPPM mode work good? i read somewhere here in the thread about sync problem with to many channels. I plan to use EU-LBT firmware.
4. I have seen threads about problems with planes waging (or rather S-ing) on RTH, or having a unreliably RTH over all. Is this a big general problem? is it related to pid tuning or is it more of a hardware problem?
5. What GPS shall is choose? does update rate or any other factor a big impact on for example course stability?
Thanks in advance!
//Fredrik
Hey Patric,
Is it possible to mix v-tail setup from naze? Or do I need external v-tail mixer.
Hi Olli,
You need to use custom Airplane and mix the tail with SMIX
To get a template to start with in CLI.
mixer CUSTOMPLANE
smix reset
smix load airplane.
Then add the extra Rudder and elevator functions on the tail servos.
Hi Patrik
can I use a CC3D board with this firmware?
I have a full naze v1 but when i install your firmware I am unable to disable the Baro ?
set mag_hardware=1 OK
set baro_hardware=1 Unknown command
Thanks in advance
Hi Patrick,
I have to say your solution for small wing works superb. It works better than a much higher budget solution.
One thing bother me a bit is the servo throw on Angle mode or Horizon mode. It seems that the servo throw was limited. quite a bit. In Rate mode, I am ok if I set the rc_rate to 2, the servo throw is then smooth and offer me full deflection. However, In angle mode, it is very limited. In Horizon mode, the deflection can go high if the stick moves to the edge, however, the transition is not smooth at all and cause a bit jerky on the flying when horizon mode is engaged. And setting that can simply in all mode map the TX range to full servo throw on the Angle mode ? On the servo tab, I have set the min and max corrected and they are corresponding to the full stick movement.
Thank you
Roy
Hi guy's,
I have a bit of a problem i can't tackle:
I have a naze board with patrik E flying wing firmware on it, it's hooked up correctly with a rx D4R-II in ppm ch3 and ch 4 signal jumped, in the receiver tab all the channels show up, on ch 5 i made a switch for arming on ch 6 the flight mode 3 pos switch, all the ch ( 3) move but i can't get the aux ch to move, on the ch mapping of my taranis ch 5 and 6 move from -100 to 100 what am i doing wrong. The - range is 1000 mid range 1500 top range 2000 throttle ch is 995 on full cut off.
The transmitter is in TAER1234 and in baseflight receiver yab as well.
Question 2: do i have to remove the elevon mix from taranis just like with any other fc.?
Appriciate the help😜
Hi Patrick!
I use your FW a few month ago on my V-tail plane. Thank you again. I really like it.
RTH is working fine, but the GPS HOLD mode is not working in the air.
If I test it on the ground FC switch to GPS HOLD mode and the EZ-GUI show it also.
In the air when I switch to GPS HOLD mode the GUI only shows angel mode and the Plane not circling. While the RTH it is working in the Air.
CAn you help me to find out what can cause this? What is the difference in the RTH and HOLD mode?
My other question is how can I test the FailSafe RTH safely? (I still not enough brave to switch of the my Taranis during the flight.)
I never fly to far, but I have to know the Plan will come back to me in case of trouble.
If it is in FailSafe RTH I will get back the control when the Plane is close to me?
Our the Plane will land automatically anyway?
Regards, Viktor
Hi.
Two short comments
- Backups - Restore [From File] and Backup [To File] works, but mixes the settings in MODE SELECTION. Better to do a dump in CLI and save the output. Restore by putting the dump in command line and save it.
- Had my CRIUS CN-06 v2.0 GPS set to 57600/5Hz and NMEA protocol. Better to use the description I found here https://github.com/iNavFlight/inav/wiki/5.-GPS--and-Compass-setup in chapter UBlox GPS manual configuration
Now I see Satellites Signal Strength and can perform a Deviation Test.
br Kalle
Whats the difference between acro and passthrough?
Thanks you so much for making this awesome guide!
In Horiz/Angle modes the throws is limited by Angle P-term..
Increase P or the mechanical throw on linkages.
The Radio mixer should be setup without mixing between channels.
That's the standard for all models.(Copters and planes)
Failsafe can be activated if ex. throttle channel drops below failsafethreashold.
Change the throw on throttle so you can trim it to trigger the failsafe.
Then make sure RX is programmed to trig failsafe.
@Dani
In Acro mode Gyros compensate and passthru is totally unstabilized.
finally manage to get a recording after few los flight.
Anybody can help, my HOME arrow seems like reversed. Are there ways to correct this?
this is my flight video
https://www.youtube.com/watch?v=9LE3tYKcZ-Q&feature=youtu.be
Yesterday I was testing Patricks firmware in my flying wing.
The flying wing was launched using auto launch.
At about one minute into the video you can see the wing stalling and entering into a spin. It happened too fast for me to react, but the firmware made a recovery manouver that saved the wing.
Thanks a lot Patrick.
https://youtu.be/Gc2F2iqZim8
@Francisco,
I think the cruise speed is low.(cruise throttle)
If you get tailwind the air speed can be close to zero.
Nice save though.
@Hartono
Is there any settings in OSD for this?
Test a RTH on short range to see if it's wrong in OSD or Baseflight.
@thomgrasso
Sorry there's no support for sonar in the code.
Dear Patrik,
I am reading your blog interestingly, And I am going to build one flying wing soon. I am a quadcopter pilot and builder. I have two questions. Do I need to do calibration before maiden? Can I use analog servo for my flying wing? Thanks.
Best Regards,
SAM.
Hi Patrik,
Thank you for your reply.
I did test the RTH and it works perfectly. The wing comeback to launching position.
Not sure where to get help on this issue.
@SAM
You need to calibrate Accelerometer with the plane level.
And a Gyro calibration before takeoff is recommended.
It's easy to shake the plane while connecting battery.
@Hartono
There's two possible scenarions.
Either there's some setting in OSD to correct it.
Or Your Naze board can be mounted reverse.
The Home arrow uses Magnometer as default in MwOSD.
Baseflight use direction from GPS for navigation.
Uou should use theese settings in MwOSD
#define FIXEDWING
#define BASEFLIGHT
@Patrik,
Thank you for your reply. Reupload the firmware with the 2 options enabled and will test tomorrow. Will report back once testing done.
Happy New Year 2017.
Hi,
is it possible to use a servo for a cam? So you can look left and right?
Thanks,
Thom
Easiest way to add a servo for camera Pan is to connect to a free channel on the receiver.
Otherwise you need to use custom servo mixing.
HI
Thanks for the flying wing code (:
A question. Angle and horizon mode is like we do in quadcopters?
Passthrough cancels stabilization and make it full manual?
Cheers
Hi Patrik,
just an update. the arrow now is working as it should. just sometimes a bit slow to update. or maybe I flew in a small area. Thank you for the tips.
this is part of the flight video.
https://www.youtube.com/watch?v=Ol0eCUr3TKM
Dear Friends.
I have a glider skysurfer a controller naze32 v6 micro osd and gps.
I use inav that is the same as cleanflight, the problem I have is that when I load the airplane configuration the controls of the airplane do not work well the depth if the engine goes well but the ailerons and steering wheel are mixed and do not How to solve this.
Can you help me . a greeting
Can someone pass me the configuration file to fly an airplane
Hej Patrik! Thanx for your work on the Fixed Wing software. I'm migrating a few Naze32 rev5 from quads to Fixed Wing and the first one is almost ready for take off using a PopWing 900mm / Teksumo using a r410X PPM Rx and a uBLOX 6M GPS.
Three questions:
#1 I have noticed that when I'm using the CLI, the commands does work but it the UI freezes and a disconnect & re connect is the only way to restore contact. Is that a known bug?
#2 You mention the flight mode Acro = Normal mode - Gyro Stabilization is active. Is that when no flight mode is selected like for a quad?
#3 How much modifications have you done to the BF software, are you still developing this fork or is it considered a finished and closed project?
Looking forward to test the software on a maiden any day now.
Tack och trevlig helg!
Hi
What Naze32 FC is recomended now for plane?
And witch GPS for this?
(for use with a normal plane and Taranis plus/R8X tx/RX )
Jan I
Hi Jan,
You can use a Naze32 6DOF.
Or a NazeMini like in the pictures in the top.
Hello,
I am very interested by a F3 board, is it planned to have F3EVO board supported by you FW in order to have RTH on fixed wing with this board too? if yes when is it expected? Thanks a LOOOT for your work!
Best regards,
Pierre
As much as i would want i don't have the knnowlage how to port the code to F3 cards.
Sorry.
Try iNav if you want to use a F3 card.
i have to say your wing software works perfect...
still i got 2 questions.
1 - can i change the throttle speed when i activate rth by a switch.
2 - is inair callibratie working and how does it work?
greets from ed
fw_cruise_throttle controlls the rth speed.
In air calibration should work like on copters.
That part of the code is common.
It's nothing i have tested though.
Hello patrick .. I mounted the naze32 on my Teksumo flying wing. It works all well, RTH,,Hold position, and flies very well in Acro and in Angle mode.
But when I switch into Horizon mode, he turns to the right and becomes almost uncontrollable.
Why?can you help me?
Thanks for the work you did!!
I'm wondering if something changed in Baseflight recently - I simply flashed your latest firmware and then typed "preset Flying_Wing" - the CLI interface didn't display any feedback. I waited for a while but couldn't click any tabs. I eventually hit disconnect and now the board won't connect or allow re-flashing the firmware.
I repeated the same process with another board. Both were brand new, now they appear useless.
Forgot to mention that the boards I'm using are latest rev Afromini Amaze boards acquired directly from Abusemark. In the past, I've successfully used two of these boards with the same hardware setup and process.
The code has not changed since last summer.
Try to short the boot pads on the FC and flash them again.
Select full erase since some settings can prevent it to boot.
I have had some afromini that behave like that to.
OK, thanks Patrik, I'll give that a try. My first thought was that Baseflight changed somehow, making the "preset" commands break. I write iOS apps, so I'm always suspecting changes to the platform ;) I've had a great time with your firmware so far!
I get the same result with the boot pins shorted, selecting "No reboot sequence" and "full chip erase." It says "No response from the bootloader, programming: FAILED"
Hi Patrick. I have a Flip32 All In One (Pro) Flight-Controller V1.03 FC. One of the signal channels is dead (motor 3). So I have to change the smix. I'm still waiting for my flying wing so i can't test. Is the only thing I have to do this?
mixer CUSTOMPLANE
smix reset
SMIX 1 5 1 50 0 0 100 0
SMIX 2 5 2 50 0 0 100 0
SMIX 3 6 1 50 0 0 100 0
SMIX 4 6 2 -50 0 0 100
The second thing is. Uart1 is switchable and is used for usb/osd. softserial2 is soldered to a current controler.
I use the uart2 for gps and softzerial1 for telemetry.
Is there any chance of using a bt modul for setting waypoints?
I have the same board in a plane.
You can use Smix like that to address the servos you need.
It's a zero missing in the last line though.
I have never used softserial on baseflight.
If you find something out please share.
Waypoints is not implemented in Baseflight.
Just to follow up - after trying a new FTDI board and having the same issue, then trying to set up a third, completely different board, and being unable to flash the firmware, I realized that the issue was in the cable I made to connect the FTDI board to the FC.
Carry on, nothing to see here! :)
Hi Patrik,
bought a Illuminati32 Board from Hobbyking. This is a Naze32 clone with OSD. Using Baseflight Config 0.68.3 I tried to flash your Baseflight_FW_160622.hex file. Bevor Flashing I shorted the boot pads of the board. Started the Load firmware (local)= 98836 bytes.
No reboot sequence on = enable
Full chip erase = enable
After clicking button "Flash firmware" starting flash, the response is: Communication with bootloader failed.
What should I do to successfully flash your firmware?
The Illuminati32 board was preflashed with Cleanflight //Naze 1.8.1 April 2015 and has KV_OSD2.2.
With cleanflight I updated / flashed this board with
Name/Version: CLCF_v2.10
Binary: cleanflight_2.1.0._NAZE.hex
This update did work!
But I wanted use your SW with Baseflight!
Hopefully you can help me, how to proceed!
with regards
Joe
The Illuminati 32 Flight Controller w/OSD seems to have a F103 so it should be compatible.
If you can connect to the FC with cleanflight configurator then all switches is in correct position.
There's some things you could test.
Try to flash with CF configurator instead of Baseflight.
Try to flash the latest online version of BF first.
There's also some tips how to flash in the Naze Manual.
http://www.abusemark.com/downloads/naze32_rev3.pdf
Good luck
Hello Patrick,
thanks for fast response and you "Good luck" wishes.
I did just now a first try with the same procedure as yesterday and I really was astonished, Flashing was successfully! Yesterday I tried it at least 10 times with 2 different computers and had no success and today thanks to your "Good luck" the first try was successful.
And going in CLI, see the result
# preset Flying_Wing
Setting preset defaults: FLYING_WING
Enabled GPS
Enabled FAILSAFE
Enabled FW_FAILSAFE_RTH
Enabled MOTOR_STOP
maxthrottle set to 2000
Thanks a lot for you help!
Hi Patrick,
in the meantime I received a Naze32 Rev6 DOF board and tried to flash your Baseflight_FW_160622.hex file with 2 different PC. The result was the same as on Oct 31, mentioned in my 1-st post here. Therefore I tried several options in order to understand my succesful flash process from 01.11.2017. See here the way I was successful to flash. I tested it several times and it works now without any problems more. Important is the step by step sequence in handling the Basflight configurator.
For experts it my be trivial, but I am less experienced and did run in these problems.
1. Naze Board Boot pads connected and USB-cable connected to Naze Board, but other end of USB cable not connected to PC
2. Start Baseflight configurator
3. Select and click Button "Firmware Flasher"
4. click "Load firmware local" from local folder the required hex file (e.g. Baseflight_FW_160622) and wait up to response 98836 bytes loaded
5. enable: "No reboot sequence" and "full chip erase"
6. Now connect Naze Board with USB cable to PC USB, if correctly connected, the blue LED is "ON"
7. Now start button "Flash firmware"
8. You can see on red bar "Flashing..." the flashing process in advance and "Verifying..." and
9. You can see red bar changes to green and info "Programming: Successful" and green LED is now blinking
10. Now disconnect board USB cable from PC USB and disconnect "Bootloader pads connection " so that pads are open, now you are ready to use complete Baseflight configurator
with following procedure which I used very first, it does not work!
1. Naze Board Boot pads connected and uSB-cable connected to Naze Board, but other end of USB cable not connected to PC
2. Start Baseflight configurator
3. Now connect Naze Board with USB cable to PC USB
4. connection starts and results in this log info:
15:55:02 -- Serial port successfully opened with ID: 1
15:55:12 -- No configuration received within 10 seconds, communication failed
15:55:12 -- Serial port successfully closed
5. Select and click Button "Flash Firmware"
6. click "Load firmware local" and wait up to response 98836 bytes loaded
5. Now start button "Flash firmware"
7. You can see following info on red bar "Communication with bootloader failed"
Hello Patrick,
Is it possible to download the firmware somewhere?
I lost mine, and this is the only firmware which is working on my plane
Hi Ronald,
Sorry i have forgot to update the link to the firmware.
But now it should work again.
Glad you like it!...
Happy landings!
Patrik
Just wanted to say thank you for updating the firmware link. I have a couple of Naze32 boards that I want to test out your custom firmware. Nowadays, everyone is talking about F7 flight controllers with high loop rates while I feel like if we could go to moon with 1969 technology, Naze32 should be sufficient to return an RC plane back to its home position using GPS.
Cheers
Alex
Hi Patrick,
I'd like to contribute to your baseflight firmware. Could you please make it available on GitHub or somewhere accessible to everyone? Thank you.
Bill
Hi,
Glad to see People still is intrested in The projekt.
The Naze still have more than enouh capacity for FPV...
The latest code is in my git.
https://github.com/EmilsPa/baseflight/tree/Dev
Remember this is not my projekt.
I have only contributed and added Fixed Wing support to it.
The FW is not fully merged in Betaflight main branch.
Happy landings On The new Year...
/patrik
Hi Patrik,
Thanks for keeping the firmware available online. I am tuning my flying wing settings, but not sure what "Gain Ratio [Power/Weight]" is at the "Airplane Setup" tab under "Throttle Control" section. When I am using the Auto Launch (RTH+GPS HOME), the flight controller needs to use more power to climb up before hitting the ground.
Should I increase the "Gain Ratio [Power/Weight]"?
Thank you.
/Alex
Hi Alex,
I haven't looked at the code for several years...
But....
Gain Ratio is only used for adding extra power to maintain altitude in normal cruise speed.
GPS_AltErr * cfg.fw_scaler_throttle
In RTH climbout stage the throttle is set directly by cfg.fw_climb_throttle
NAV_Thro = cfg.fw_climb_throttle; // Max Allowed Throttle
It's limited to 1900 in default.
If you increase it to 2000 to get full power in RTH-climbout.
/Patrik
Hi Patrick
It may seem strange, but I continue to use your system in my gliders.
It happens to me that, from time to time, the gps loses satellites while I'm flying, when it picks them up the RTH location has changed.
is it possible to block the coordinates for RTH at the point of first power up and fix the gps?
Thank you
I hope you still read these pages
HI
Paolo
Skicka en kommentar